Architected Materials
Designing and analyzing cellular and metamaterial architectures for tunable stiffness, damping, and Poisson’s ratio.

Hello! I’m Mo Zadeh, a seasoned engineer, designer and researcher.
I am a multidisciplinary thinker and developer working at the intersection of structures, materials, and robotics.
In structures and architected materials, I focus on the design and analysis of advanced mechanical systems, including mechanical metamaterials with programmable properties such as tunable stiffness, controllable Poisson’s ratio, multistability, and tailored thermal expansion. This domain also encompasses my work on aerospace structures, where I apply analytical methods and high-fidelity numerical simulations—primarily using Abaqus—to evaluate and optimise structural performance under complex loading conditions.
In robotics and mechanisms, I design complete robotic systems as well as their underlying mechanisms and actuators. My work includes the development of novel actuation strategies, such as electrostatic and pneumatic systems, enabling adaptable, efficient, and high-performance robotic solutions.
In biomedical engineering, I translate principles from architected materials into medical applications, design concepts of implantable active devices, and develop novel composite materials including gradient stiffness materials for improved tissue–implant integration.
Across all three domains, my work is driven by a unified goal: to create intelligent, adaptive, and high-performance mechanical systems by bridging fundamental mechanics, advanced manufacturing, and real-world applications.
Designing and analyzing cellular and metamaterial architectures for tunable stiffness, damping, and Poisson’s ratio.
Concept-to-prototype workflows, optimization, and rapid fabrication for performance‑driven products.

Lightweight structures and morphing components; dynamic characterization and reliability.
Soft actuation, sensing, and control; data‑driven design for robust, adaptive mechanisms.
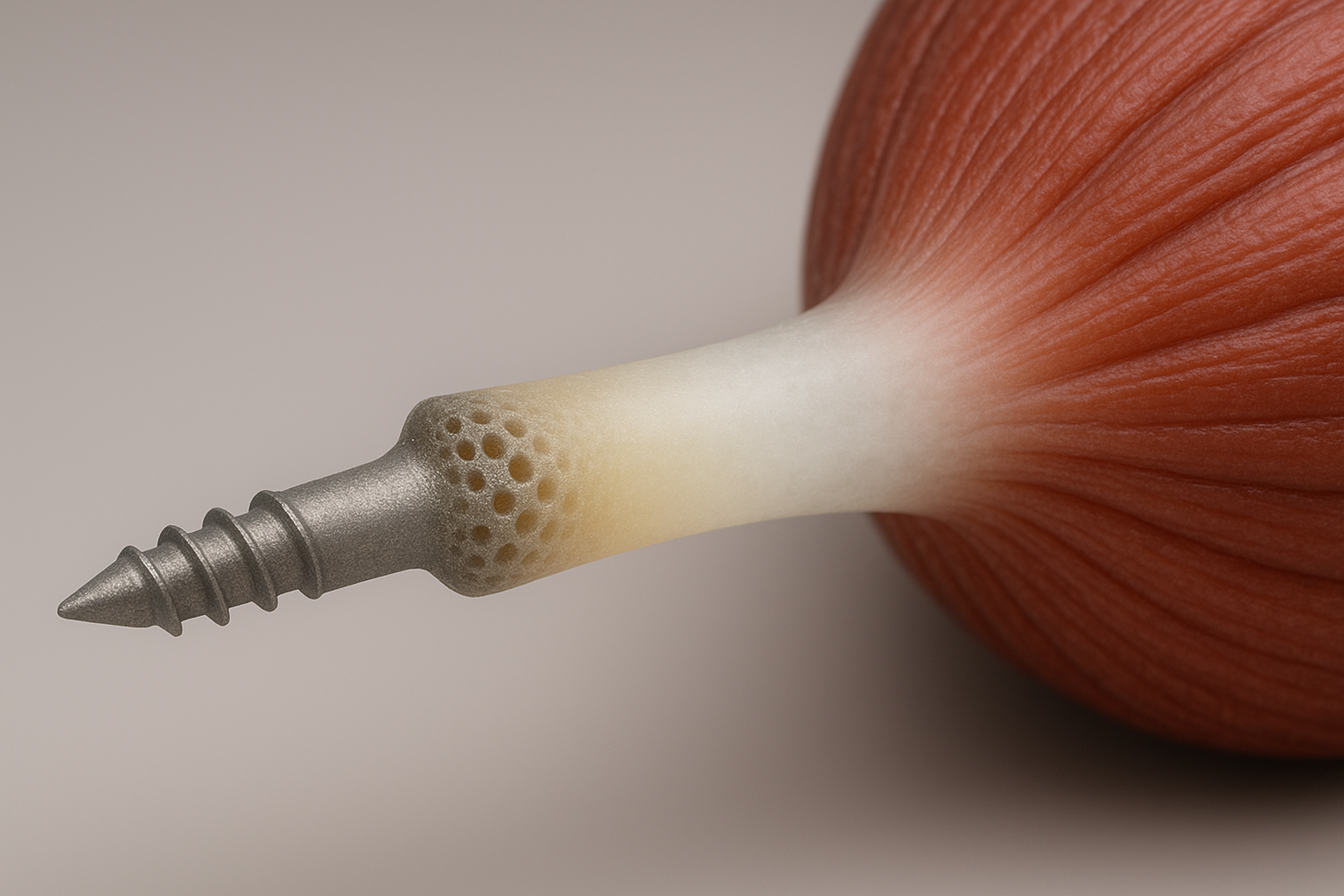
A biocompatible soft-hard gradient stiffness composite specimen with over 6 orders of magnitude change in modulus was created.
I introduce rolling as a deformation mechanism that augments design freedom for stiffness tuneable metamaterials.
A novel architected material with zero Poisson's ratio and compliance in both planar directions is introduced.
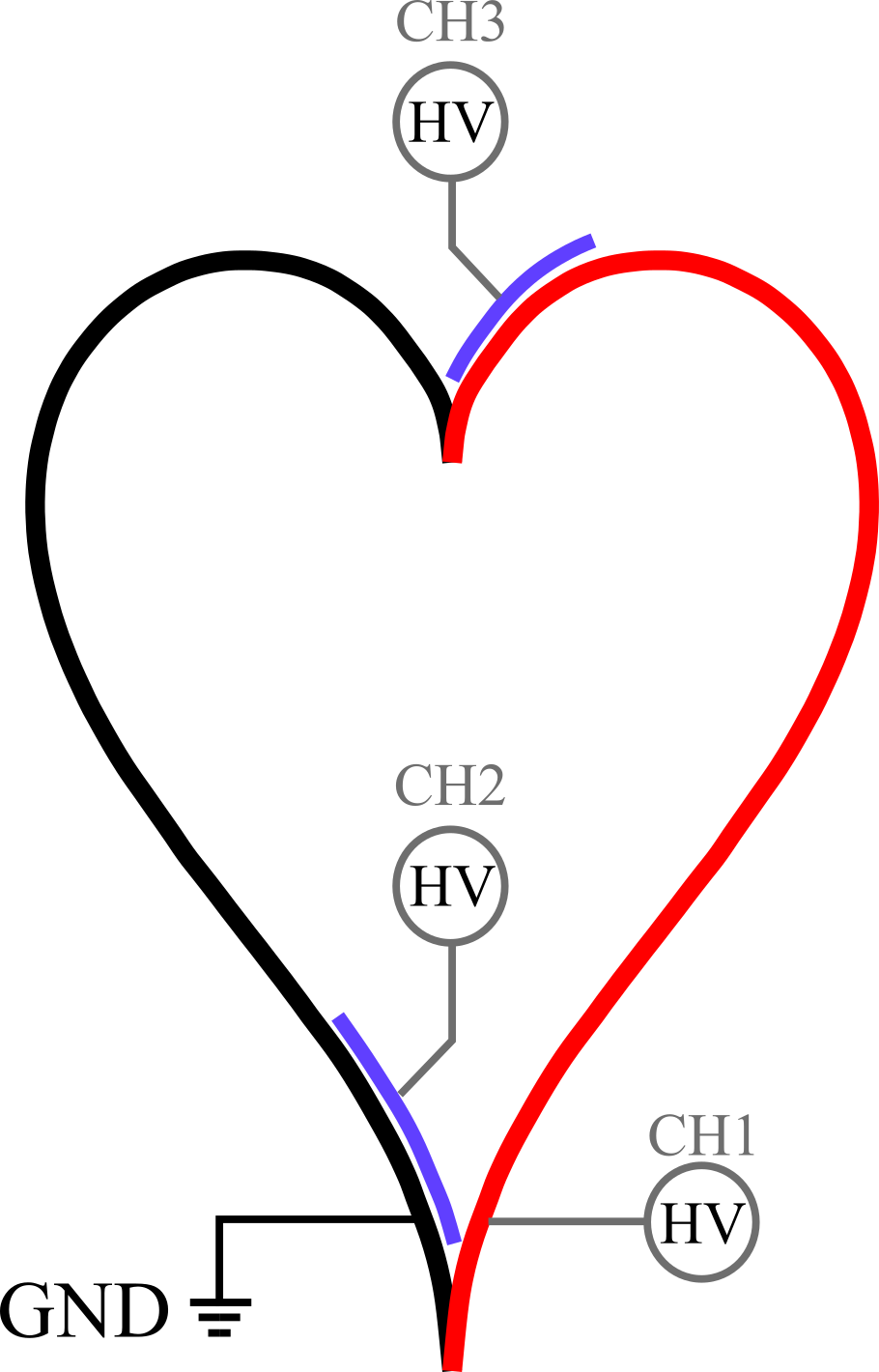
In this projet we show how using geometry can help in simplifying the systems that require antagonism with one single bi-directional actuator.
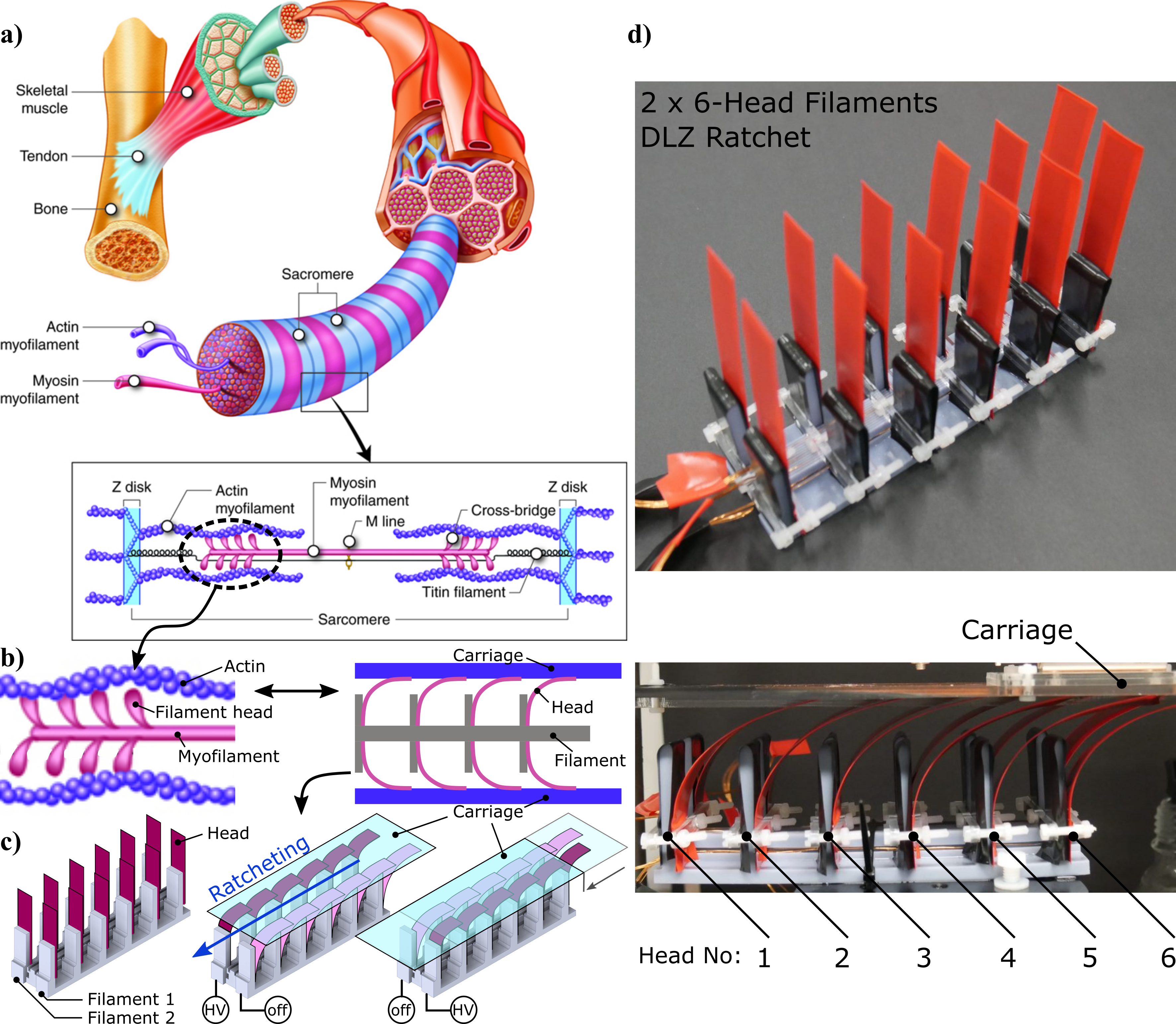
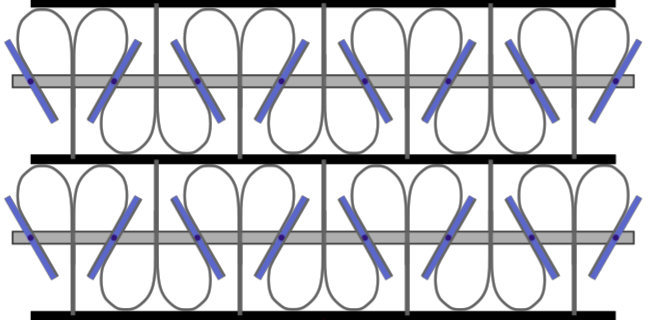
We designed and characterized an electrostatically actuated mechanism inspired by the actin-myosin interaction to generate large stroke actuation and amplify force.
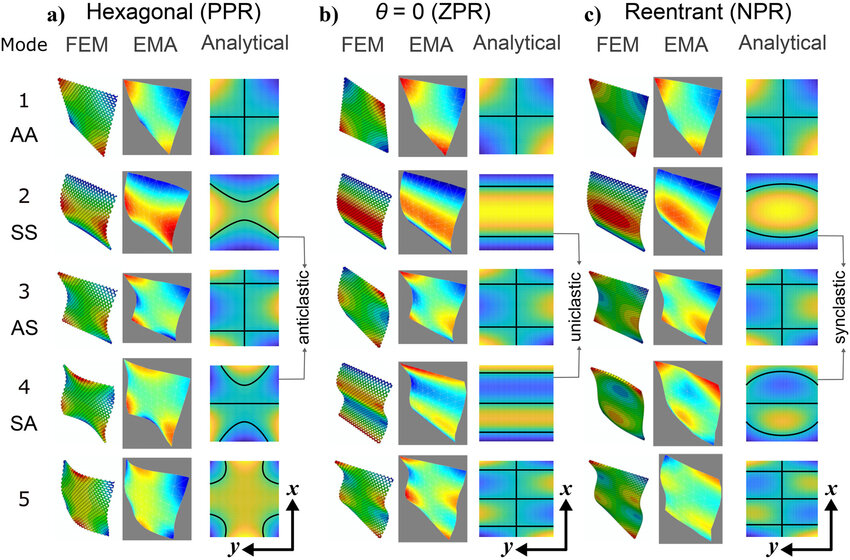
Tuning the Poisson's ratio in hexagonal unit cells and its effect on damping and mode shapes.
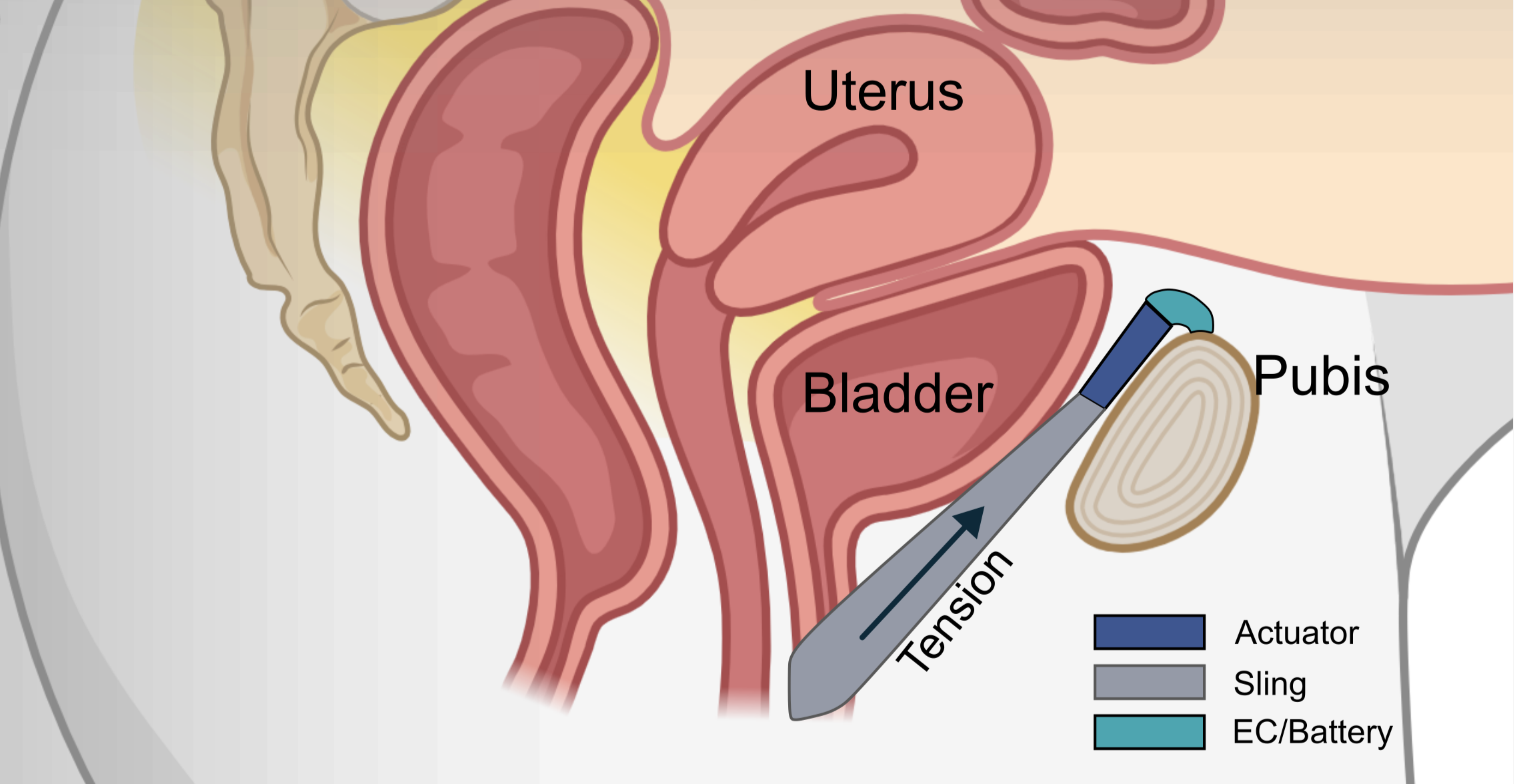
Active suppression of the stress urinary incontinence (SUI) using implantable robotic devices is a concept for future interventional medicine.
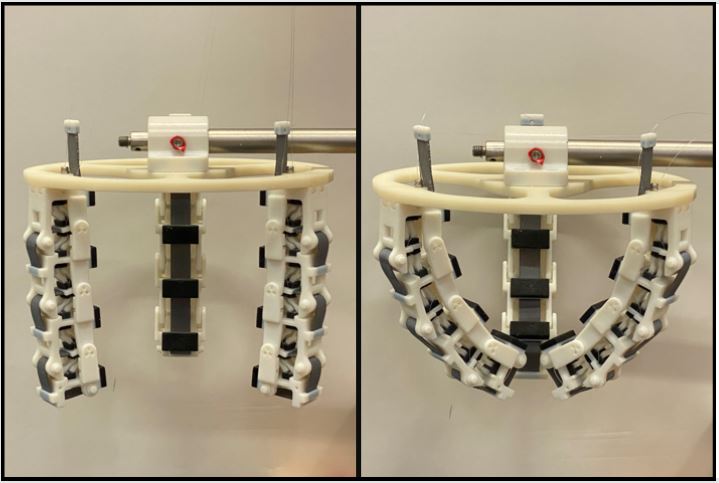
For aerial robotics applications, a bistable self-locking gripper was designed and fully 3D-printed using multimaterial inkjet printing.
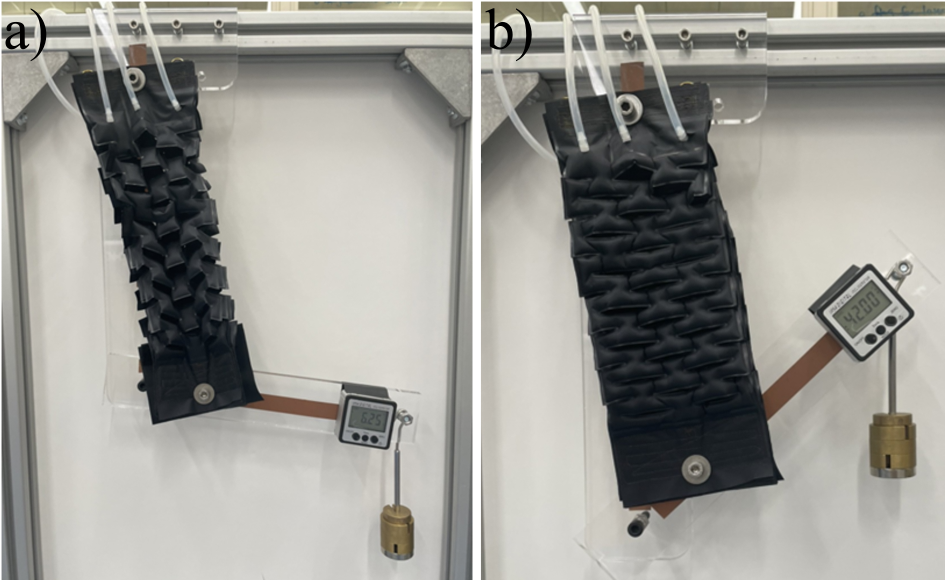
A fabric-based kirigami actuator with pneumatic actuation was developed that integrates with dress for rehabilitation.
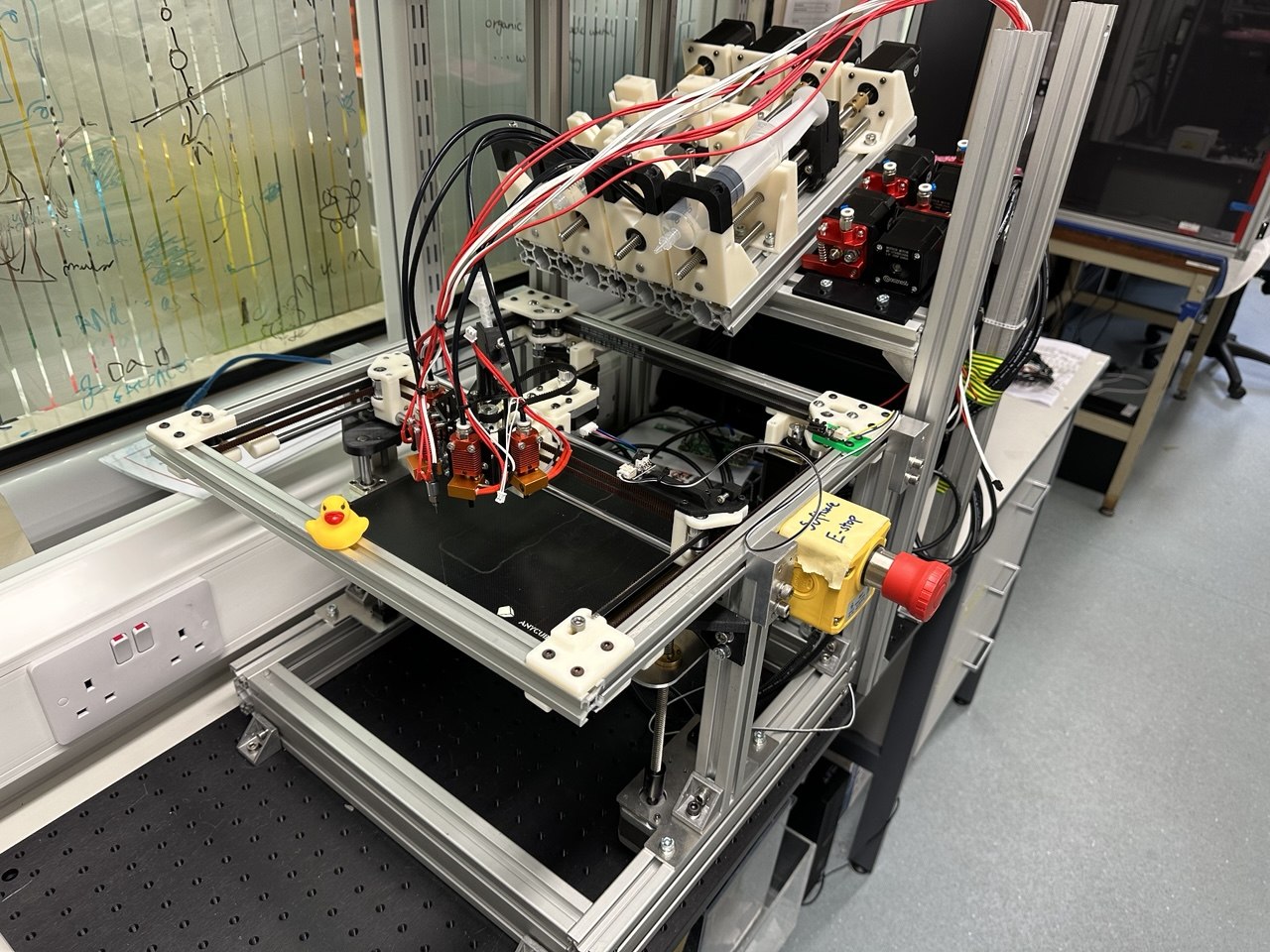
A multimaterial capable 3D printer based on direct ink writing was developed and tested for printing silicones and hydrogels.

Specific design and sizing for interceptor drones to achieve high speeds is required to intercept one-way attack drones successfully.
Use the form below to get in touch. (If it doesn’t load, use the direct link or email me.)
Direct link: Open the form
Or email me at mo.zadeh.aero@gmail.com